首次月背“挖土”归来!嫦娥六号实现三大技术突破,人类探月补上重要拼图
6月25日,携带约2千克采集自月球背面的月壤样品,嫦娥六号返回器在内蒙古四子王旗着陆场回到了地球家园。至此,长达53天的嫦娥六号任务划上了圆满的句号。 从这一刻起,我国成为世界上唯一一个两度着陆月球背面的国家,并在人类历史上首次从月球背面成功采回月壤。这一历史性创举不仅代表着中国在航天领域的技术突破,更意味着我们为人类探月补上了一块重要拼图。 作为嫦娥五号的备份,嫦娥六号为这次史无前例的任务做了哪些改进与准备?实现了哪些技术突破?本报特邀全国空间探测技术首席科学传播专家庞之浩对此进行解读。 ——编者 5月3日到6月25日,在这刚刚过去的53天中,中国航天又完成了一项历史性创举——在人类历史上首次从月球背面成功采回了月壤。完成这一使命的嫦娥六号任务,经历了长达六年的等待。这次,它终于不负众望,达成了既定的工程目标和科学目标。 作为嫦娥五号的备份,嫦娥六号的整体结构与嫦娥五号基本一致,但与嫦娥五号任务在月球正面采样返回相比,嫦娥六号任务是在鹊桥二号月球中继星的支持下,首次实施月球背面采样返回。由于着陆点从正面改为背面,并受轨道设计及窗口的约束,嫦娥六号任务总的飞行时间比嫦娥五号增加了30天。 为了实现这一壮举,同时开展更广泛的科学探测和国际合作,相关研发人员对嫦娥六号探测器进行了一系列适应性改进。除了检测替换探测器上与嫦娥五号相同的部分产品外,航天科研人员还对导航控制指令进行了重新设计,并在工程上实现了月球逆行轨道设计与控制、月球背面智能快速采样、月球背面起飞上升这三大关键技术的突破。
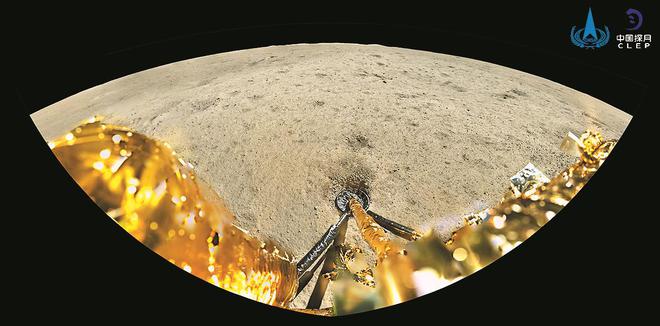
嫦娥六号拍摄的月背影像图 逆行环月轨道 巧妙化解光照反转难题 由于嫦娥六号任务是在月球背面着陆,着陆位置也由月球的北纬地区变为南纬地区,因此它不能沿用嫦娥五号开辟的路线前往,而是要重新选择一条最优轨道。 在月球上,太阳始终直射在月球赤道附近的区域,如果仍然采用原有的环月顺行轨道方案,那么当探测器在月球南半球着陆时,与嫦娥五号任务相比,就会出现受晒面调转180°的情况——即探测器本应朝阳的一侧处于阴影中,而应当处于阴影环境的一侧处于光照中。这会影响采样过程中的能源供给和采光等。 然而,作为嫦娥五号的备份,嫦娥六号沿袭了"前辈"既有的构型布局和硬件产品。为了不大幅调整探测器的构型布局和硬件产品,设计师们为"六姐"重新设计了一条环月轨道,也就是"逆行环月轨道"方案。 简单来说,这个方案就是让嫦娥六号在环月轨道上的飞行方向与月球自转方向相反,这样无需调整探测器设计方案,也能保证它随时随地"能量十足",顺利化解了因着陆点变化带来的朝向、姿态等问题。 这条由东向西环月的逆行轨道,可为嫦娥六号探测器提供更加稳定和均匀的空间外热流环境,确保探测器姿态幅度调整最小,在飞行过程中技术状态稳定,动力下降初始姿态和落月后月面工作姿态与嫦娥五号基本一致。为了能在预选位置着陆,研发人员还优化了轨道设计和控制以及整个动力下降和着陆过程的策略,从而提高了着陆安全性。 这次嫦娥六号着陆-上升组合体精准而稳当的完美落月,凝聚了科研人员的无数心血。 相较于月球正面,月背陨石坑更多,地势更为崎岖。为了在"山脉中找平地",在嫦娥六号出发前,科研人员在选址上下足了功夫。在选址过程中,用嫦娥二号获取的影像所制成的全月7米分辨率数字正射影像、20米分辨率的数字高程模型产品发挥了重要作用,科研人员借助它们为嫦娥六号寻找坡度较小的平坦区域。 与嫦娥五号任务相比,嫦娥六号任务落点范围缩小了一半,而且在整个落月过程与月面工作过程中,只有鹊桥二号中继星进行支持,所以落月过程几乎全程无法地面干预,完全靠探测器自主执行。
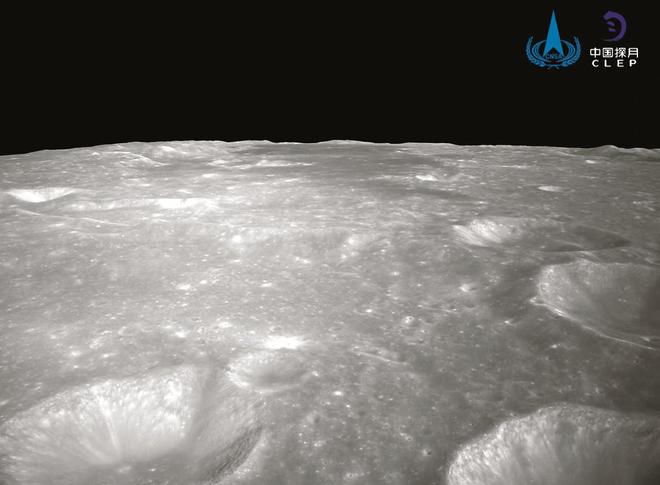
嫦娥六号月背着陆影像 从嫦娥六号着陆-上升组合体实际的落月时间和落月姿态看,误差都在设计指标内,这次落月任务是圆满的。尤其着上组合体在月背软着陆之前,经受住了"最后一落"的冲击。 组合体上四条轻质、高强的"纤纤美腿"让它落月更轻盈。每条着陆腿都由一个主腿、两个副腿和一个足垫组成。着陆前,由新型高强合金材料与特殊材料填充制成的主副腿协同工作,着陆时安全支撑住探测器的身体,将各种冲击力传递、吸收。而着陆器搭配的四个"足垫",好像四个脸盆大的圆形"大脚掌",每个的直径足有普通人脚掌的2倍,其盆状结构及设计巧妙的"足弓"可起到更好的缓冲作用,防止着陆器在着陆月背时"摔倒",提升落月时的"脚感"舒适度。 月背智能采样 采得着、钻得动、封得住、回得来 此行是世界首次在月球背面靠近南极的区域进行采样,嫦娥六号遇到了三大挑战: 一是月球背面相对地球不可见,为保证数传链路的连续性,需要靠鹊桥二号中继星搭桥; 二是由于采样地点所处的纬度较嫦娥五号更高,月壤的风化程度相较于低纬度更加不充分,月壤中石块含量更多,这对地面规划及采样机构是一个更大挑战; 三是采样时间比嫦娥五号更短,整体工作流程更复杂,任务难度非常大。 智能采样是嫦娥六号任务的核心关键环节之一。与嫦娥五号相比,鹊桥二号中继星支持地月之间联系的时间,由48小时缩短到40小时。受此限制,着陆器的月表采样时间从嫦娥五号的21小时缩短为14小时。
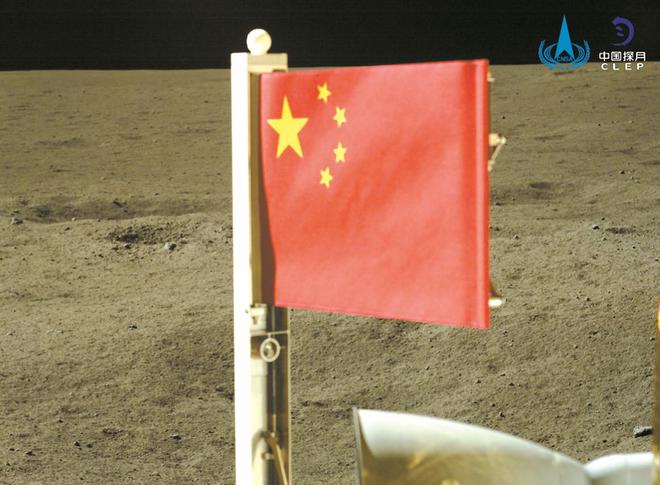
机械臂进行月背表取 为此,研制团队设法提高了采样效率,使嫦娥六号在月面采样的快速化、智能化和自主化方面有了很大改进。他们为表取采样过程设计了17个独立的序列,器上设备能自主判读遥测数据,通过序列组合完成表取采样全部工作。这使得整个采样任务减少了约500条器地指令交互,从而缩短了采样时间。 月背表取不是直接用铲子铲,而是要经过拍照、重建三维地形、生成机械臂运动策略等一系列的智能操作。例如,负责挖土的机械臂有4个自由发挥的空间,选定区域后,它会在面积约七八平方米的范围内完成铲土。最后,采样机构要把钻取和表取的月壤分类打包。 针对月背更加复杂的环境和着陆区月壤特性,研制团队在继承嫦娥五号相关技术方案的基础上,为嫦娥六号采样封装分系统进行了多项升级,设计了适应月球背面采样的控制算法和采样策略,以确保月背采样"采得着、钻得动、封得住、回得来"。 为了能"钻得动",研制团队通过对比多种设计方案,"百里挑一"确定了钻头、取芯机构以及相应构型。例如,钻头被设计为多个切削面,具备高硬度岩石钻进能力,针对不同颗粒度月壤具备切削、拨、挤、排等能力,在实现高效取芯的同时具有良好的层序保持特性。这些钻头功率高达1000瓦,不仅具备对八级硬度岩石的钻孔能力,还配有反复捶打装置和冲击能力,能一边松动月表深层土壤、一边向深层钻取。这些采样机构还能一边钻土、一边打包,像做香肠一样,把钻取的月壤有层次地自动裹进打包袋里。 为了保证"封得住",获取的样品在提芯过程中不发生掉落,封口器采用了扭转密闭式结构,并进行大应变材料设计,实现了简单可靠的封口——哪怕长时间处于大变形承载状态也不会发生应力松弛现象。针对采集的月壤样品具有可变形特征,研究人员还专门设计了特殊的提芯拉绳,确保取芯软袋具有确定的几何形状,方便了样品传送和转移。 表取完成后,嫦娥六号着陆器携带的五星红旗在月球背面成功展开,这是我国首次在月球背面独立动态展示国旗。这面国旗采用新型复合材料和特殊工艺,其中旗面是由玄武岩熔融拉丝技术制作而成,具有更强的耐腐蚀性、耐高温和耐低温等优异性能。
嫦娥六号着陆器在月球背面展示国旗 月背起飞上升 自主准备零窗口点火 6月4日,嫦娥六号携带的"移动相机"自主移动并成功拍摄、回传了着陆器和上升器合影。该"移动相机"是由中国空间技术研究院研制的月面自主智能微小机器人,质量为5公斤,可在月表自主智能移动。 在嫦娥六号奔月和落月过程中,这台小机器人一直被悬挂在着陆器的侧板外。嫦娥六号完成月背采样后,这台小机器人自主分离到月球表面、自主移动到合适的拍摄位置、自主选择拍摄角度、自主构图,并进行成像位置的智能优化,最终拍摄了这幅着陆器上升器组合体在月球背面的第三视角真实图像。
嫦娥六号着陆器和上升器在月背合影 与嫦娥五号月面起飞相比,嫦娥六号从月球背面起飞,无法直接得到地面测控支持,需要在鹊桥二号中继星辅助下,借助自身携带的特殊敏感器,实现自主定位、定姿,工程实施难度更大。 嫦娥六号的月面起飞分为起飞准备、垂直上升、姿态调整和轨道入射四个阶段,最大的难点是智能自主控制,尤其是在月面起飞的第一阶段——月背起飞必须考虑到和中继星通信不畅的情况,所以嫦娥六号智能自主起飞准备是与嫦娥五号最为不同的地方。 进入起飞准备程序后,嫦娥六号开始进行自主位置确定、自主姿态确定和自主起飞参数计算等。嫦娥六号起飞的整个过程都是由制导、导航与控制系统来控制的。 由于月面起飞的时间点是零窗口,要求上升器必须按时起飞。这是因为月球自转周期是一个月,一旦错过这个对接窗口,就得再等上一个月。所以,到了起飞时间,制导、导航与控制系统就会控制上升器主发动机,自行点火起飞。 所有月面起飞参数是由地面精准计算的。地面测控人员根据着陆的位置和姿态、环月的轨道,为嫦娥六号上升器计算出最佳飞行方向和参数,以保障上升器以这种方式起飞。这样,它才能以最省燃料的方式进入交会对接初始轨道,与一直在月球轨道运行的轨道-返回组合体交会对接。 哪些国际载荷同去月球背面 与嫦娥五号相比,嫦娥六号搭载了更多的科学载荷。除了3台国内载荷外,还有4台国际载荷,而嫦娥五号没有搭载国际载荷。 由此可见,嫦娥六号此行的意义超越了国界,标志着人类团结合作、和平利用外太空的历史性进步,也让人们对中国2030年前实现载人登月、2040年前建成一个完善型的国际月球科研站有了更多信心与期待。 嫦娥六号着陆器搭载了来自法国、欧洲航天局、意大利的3台载荷,轨道器则搭载了巴基斯坦独立运行的立方星。为了确保搭载设备可靠工作,研制团队对国际搭载进行了专门的国际搭载设计,并对搭载安全进行了特殊考虑和充分验证。 法国的氡气探测仪(DORN)用于对月球表面氡气同位素开展原位探测,研究挥发物在月球环境下传输和扩散机制,包括月球尘埃的迁移,以及月球风化石、月球水资源等之间的相互作用,它在地月转移、环月阶段和月面工作段均进行了开机工作。 欧空局的月表负离子分析仪(NILS)用于对月球表面负离子进行探测,探测负离子对空间、表面和行星体的重要性,研究等离子体和月面的相互作用机制,它在月面工作段进行了开机工作 意大利的激光角反射器(INRRI)由两个被动激光逆反射器组成,用于激光测距。作为在月球背面的定位绝对控制点,它安装在着陆器顶部,可与其他月球探测任务开展联合测距与定位研究。 巴基斯坦的立方星(ICUBE-Q)重达7千克,搭载了两台拍摄月球的光学相机,用于开展在轨成像任务,验证纳卫星月球轨道探测技术。它不仅拍摄轨道器、月球和地球的图像,还探测月球磁场。 嫦娥六号上搭载的3台国内载荷,分别是用于获取着陆区和采样区高分辨率月表图像的全景相机,用于获取月表采样区光谱数据、进行着陆区月表矿物组分分析研究的月球矿物光谱分析仪,以及用于探测月表地下月壤结构、为钻取采样过程提供信息支持的月壤结构探测仪。这些分析数据将与后续的月球样品实验室分析数据进行关联,从而丰富和拓展月球样品实验室的研究成果。 >>>53天飞行实录 嫦娥六号任务飞行全过程约53天,由11个飞行阶段组成: 发射入轨段 5月3日17时27分19秒,嫦娥六号由长征五号遥八火箭发射。 地月转移段 器箭分离后嫦娥六号沿近地点高度约200千米、远地点高度约38万千米的地月转移轨道飞行约5天,期间进行了中途修正。 近月制动段 5月8日10时12分,在离月面高度200千米的近月点附近,嫦娥六号实施了第一次近月制动减速,进入轨道周期12小时的环月椭圆轨道,开始环月飞行。 在这一阶段,它共进行了3次"刹车",比嫦娥五号多了一次,这样可在下降前的20多天里不断调整轨道参数,高精度瞄准着陆点,等待降落最佳时机。 5月21日,释放巴基斯坦立方星。 环月飞行段 从5月8日探测器进入环月椭圆轨道开始,直至着上组合体到达动力下降初始点为止。 6月1日,嫦娥六号上的火工装置起爆,在环月圆轨道上完成了着陆-上升组合体、轨道-返回组合体两两分离。分离后,轨道-返回组合体继续环月飞行,等待上升器进行交会对接;着陆-上升组合体则通过实施两次降轨变轨,进入到近月点约15千米、远月点约200千米的椭圆轨道。 着陆下降段 6月2日6时23分,着陆-上升组合体在鹊桥二号中继星支持下成功着陆在月球背面南极-艾特肯盆地预选着陆区。 在动力下降前,着陆-上升组合体先与鹊桥二号建立通信链路,然后经过主减速段、快速调整段、接近段、悬停段、避障段、缓冲下降段和着陆缓冲段7个阶段,用时约15分钟,最终在月面预定区域软着陆。 月面工作段 着陆-上升组合体着陆后,先后采用钻取和表取两种采样方式对月壤取样。 首先进行持续3小时的世界首次月球背面样品钻取,获取了月背不同深度的月壤样品,于6月2日12时40分完成。 然后对月表月壤取样(即表取),主要采样目标是月球表面的风化层样品。操作进行了约20个小时,采集的样品转移至位于上升器顶部的样品容器内。6月3日清晨,完成世界首次月球背面样品表取及样品封装。 之后,国旗展开,上升器完成起飞准备。 与此同时,国内载荷、国际载荷开展就位探测;在月球轨道运行的轨道-返回组合体通过实施4次调相机动,准备迎接上升器与之交会对接。 月面上升段 6月4日7时38分,携带月球样品的上升器以着陆器为平台,通过3000牛主发动机点火,在月面起飞加速至月球逃逸速度(约2.4千米/秒)。点火时产生的上千摄氏度高温使着陆器寿命终止。 上升器月面完美起飞后,在鹊桥二号中继星辅助下,经历了垂直上升、姿态调整和轨道射入三个阶段,顺利进入上升目标轨道。 交会对接与样品转移段 6月6日14时48分,上升器与轨道-返回组合体采用了"握手+抱紧"的方式,完成月球轨道交会对接。这是本世纪第2次月轨交会对接。 完成交会对接后,上升器于15时24分将月球样品容器安全转移至返回器中,完成月壤样品转交。此后,完成使命的上升器及对接舱段被轨道-返回组合体择机分离。 环月等待段 轨道-返回组合体在环月轨道停留约14天,等待月地转移窗口。6月20日,通过轨道器上的3000牛主发动机实施两次月地转移入射机动进入月地转移轨道。 月地转移段 轨道-返回组合体在月地转移轨道飞行5天后,于6月25日抵达地球附近,期间进行了中途修正。 再入回收段 当轨道-返回组合体飞行到达距地球约5000千米高度处,返回器与轨道器分离,并进入高速再入返回跟踪测量链跟踪范围。 6月25日,在距地表120千米高度时,返回器以10.9千米/秒速度用半弹道跳跃式再入大气层,最终通过伞降辅助降落着陆于内蒙古四子王旗着陆场,历时53天的地月往返之旅完成。 作者:庞之浩 文:庞之浩图:国家航天局编辑:许琦敏责任编辑:任荃 转载此文请注明出处。 转自https://www.163.com/dy/article/J5HLTB4L05506BEH.html 该文章在 2024/6/26 10:36:12 编辑过 |
关键字查询
相关文章
正在查询... 



|


 400 186 1886
400 186 1886